
2007
PackBot Explorer -
Major Redesign
My main project was updating the controller (hardware & GUI) for the PackBot Explorer, a rugged military robot. This project was for the Defense & Security division but the Home & Top Secret divisions often requested my consultation.
THE PROBLEM
The Iraq War was ongoing and the company saw an opportunity to sell PackBot Explorers to the military and save lives. Its controller prevented sales, however. It was a proof of concept thrown together over a weekend and wasn't fit for purpose.
MY ROLE
I believe I was the first at iRobot to guide a team and a product through UCD. I was an experiment, an ambassador, and the only UXer for my first 6 months. I performed user research & problem understanding, rallied a team around a vision, designed, usability tested, & collaborated with development especially during implementation.
iRobot is the world's leading consumer robot company
THE RESULT
-
Identified a serious project risk early
-
The GUI was significantly improved, validated by usability study and feedback from Ft. Benning
-
The value of UCD was proved to myself and iRobot with all 3 divisions wanting more.
View on desktop
Initial Objective
Keeping the PackBot Explorer robot as is, design a better Operator Control Unit (hardware, software, and GUI) for Dismounted Infantry personnel.
The PackBot Explorer

The head pans & tilts, has cameras, lights, & 2-way audio. (1 more image →)

In "prairie dog" pose for a higher vantage point.
The head pans & tilts, has cameras, lights, & 2-way audio. (1 more image →)
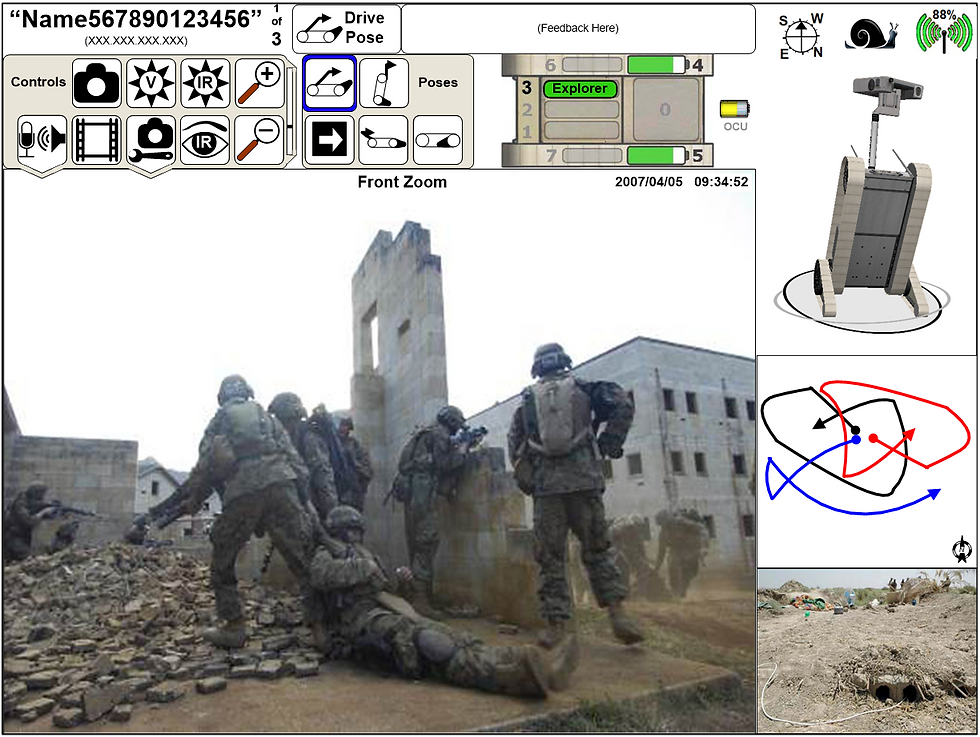
The old Operator Control Unit (OCU)
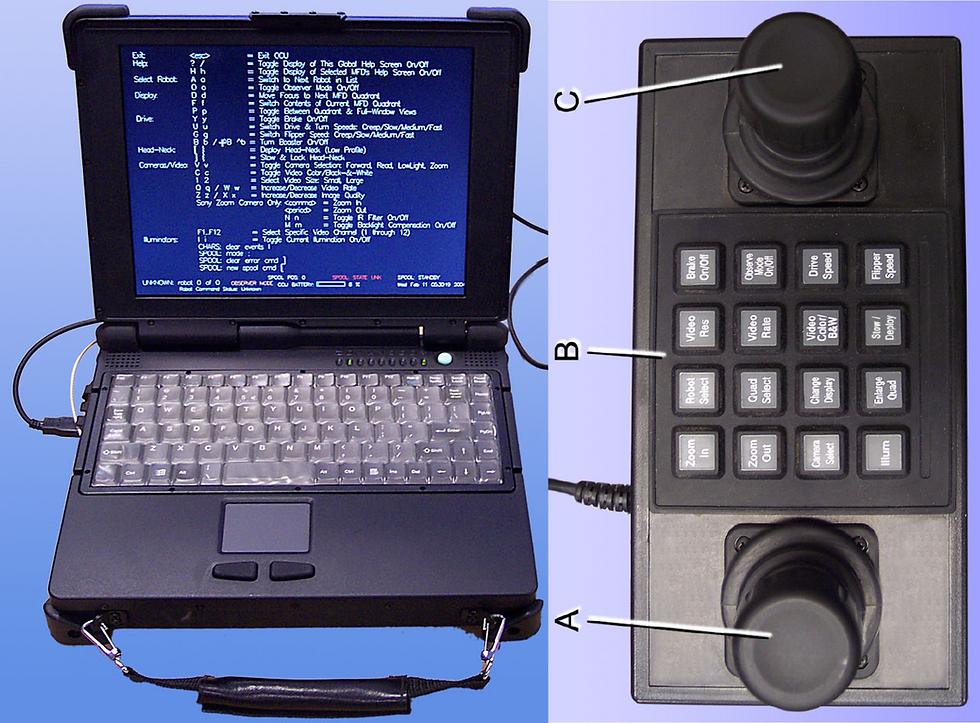
A Panasonic Toughbook & custom joystick. (3 more images →)

The old "Quad" screen. Each quadrant also had a full screen version (not shown).
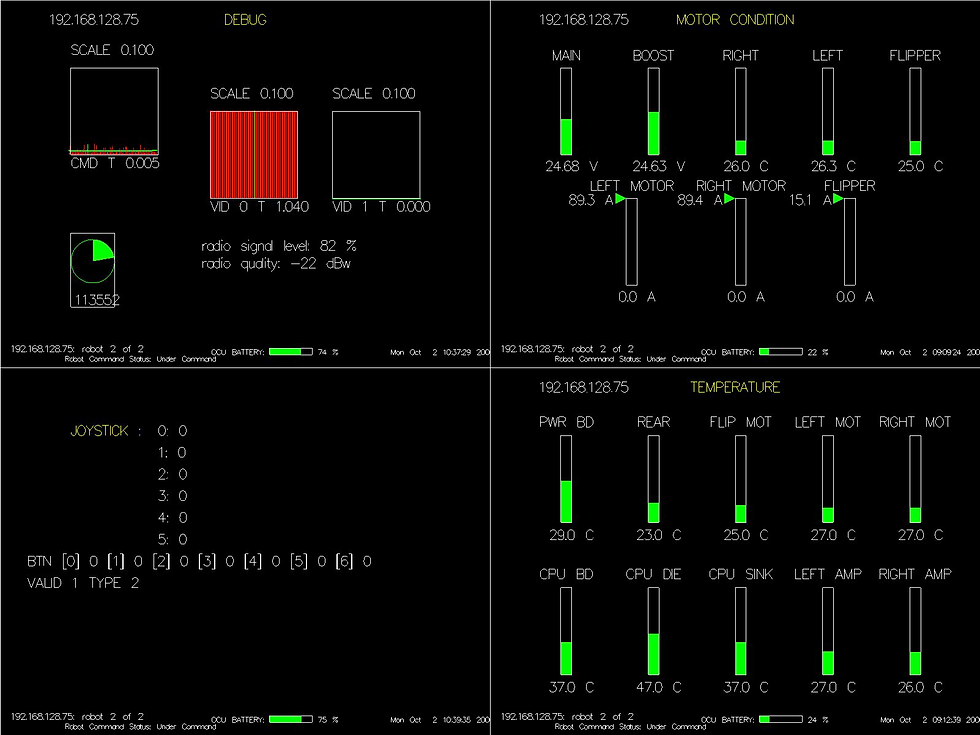
Developer-centric screens, useless to the operator.
A Panasonic Toughbook & custom joystick. (3 more images →)
The project team
Core
-
Mechanical engineer - lead
-
3 software developers
-
Myself
Supporting
-
Systems Engineer
-
Marketing
-
QA
-
3D modeler (on call, remote)
Getting oriented
-
Military standards especially human factors, ergonomics, & GUI design
-
Internal Concept of Operations (ConOps) for user profiles & mission scenarios
-
Competitive analysis to weigh their capabilities, controllers, & GUIs
-
User Manuals for robot and controller capabilities
-
Published research on the PackBot which was surprisingly abundant
-
Published research on infantry teaming since the operator is part of a unit on a mission
-
Infantry gear for controller constraints & ergonomics
-
Video games as I suspected this interaction model would play a role
-
Internal stakeholders for their insights & perspectives
-
Development for technical history, gotchas, & constraints

User insights
Now armed with informed questions, it was time to get answers. Over two days, I conducted individual, semi-formal interviews with 5 dismounted infantry soldiers (active-duty and discharged) at iRobot.

Various controller prototypes to spark conversation (2 more images →)

A modular prototype with Commercial Off-the-Shelf (COTS) components.

Would they carry the ~40 lb. robot while on foot patrol?
Various controller prototypes to spark conversation (2 more images →)
Following human subjects protocols, each 2 hour session was video recorded. I probed on what equipment characteristics they value, controller preference, and the robot's suitability for their missions. I left time at the end for prepared questions. Afterward, I collated findings, made supporting video clips, then presented to my team.
Project realignment
The interview findings severely challenged company plans and assumptions however, the video clips were persuasive.
The robot's mission suitability

Marketing's "raid & recon" narrative was invalidated.
Controller preference

Integrated preferred
vs.

Modular not preferred
A revised objective
Keeping the PackBot Explorer robot as is, design a better Operator Control Unit (hardware, software, and GUI) for Dismounted Infantry personnel with close vehicle support on these non-clandestine missions: (see above)
User preference for the integrated controller wasn't denied however, the company moved forward with the modular controller. Rationale:
-
An integrated controller would take too much time & money
-
The modular controller was "better than the legacy controller"
Then I played video games!
Really. I did. Users played video games and this was the most promising interaction model for the GUI and controller. I hadn't played in years so I ordered an Xbox and a PS2 with popular "1st person shooter" and racing games.
GUI human factors
Below are small samples of the Dismounted Infantry user profile and human factors I researched and documented.
Partial persona
-
Infantry: Army and Marines
-
Men between 17-55, typically younger
-
0-4 years of combat experience
-
7-10% color deficiency (5% deuteranopia)
-
91-98% high school educated (vs. 79% for civilians)
-
High video game familiarity if not before, then during deployment
-
Hands on primary weapon
-
Constant vigilance punctuated by extreme stress / cognitive load
-
Frequent kneeling & prone position
-
Heavily burdened by equipment & gear
-
Value safety & equipment reliability above all else
-
Want to blend in (being “special” can be lethal)

Other Design Challenges
-
Dismounted infantry users are hard to find!
-
No mouse or keyboard
-
Local vs. remote situational awareness
-
Wayfinding / Mapping
-
Training / Scaffolding
-
Dark adaptation
-
Effectively using 2-way audio
The design must be "chunky" & high contrast
-
In anticipation of a future integrated controller and gloved operation
-
Intense daylight
-
Design needed to compensate for insufficient screen technology
-
Design begins

In the beginning, I created an information architecture and initial copy.
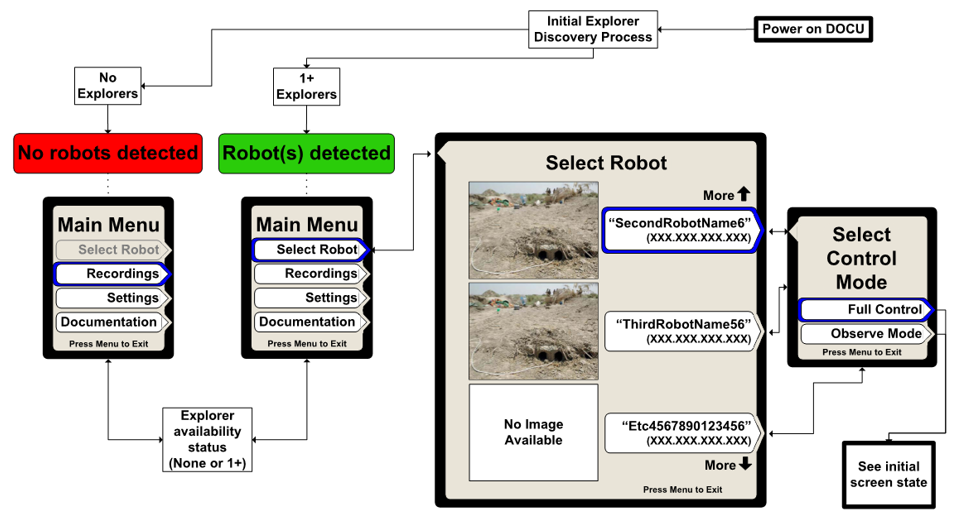
Some early UI was added to the flow.

Experimenting with controls and states. Everything was designed from scratch.
In the beginning, I created an information architecture and initial copy.
Combating cognitive load
-
One-click robot poses
-
Self-explanatory graphics & icons
-
Mnemonic support (e.g. - labeling, when appropriate)
-
Removing unnecessary information
-
Contextual controls
-
Minimizing controller modes
-
Leveraging prior knowledge (e.g. - video game controller mappings & interface interactions)
-
Data fusion (e.g. - the 3D model seen next)
Low-value info competing with scattered, high-value info adds stress and cognitive load.

Removing low-value info and fusing high-value info leverages human pre-attentive image processing.
Low-value info competing with scattered, high-value info adds stress and cognitive load.
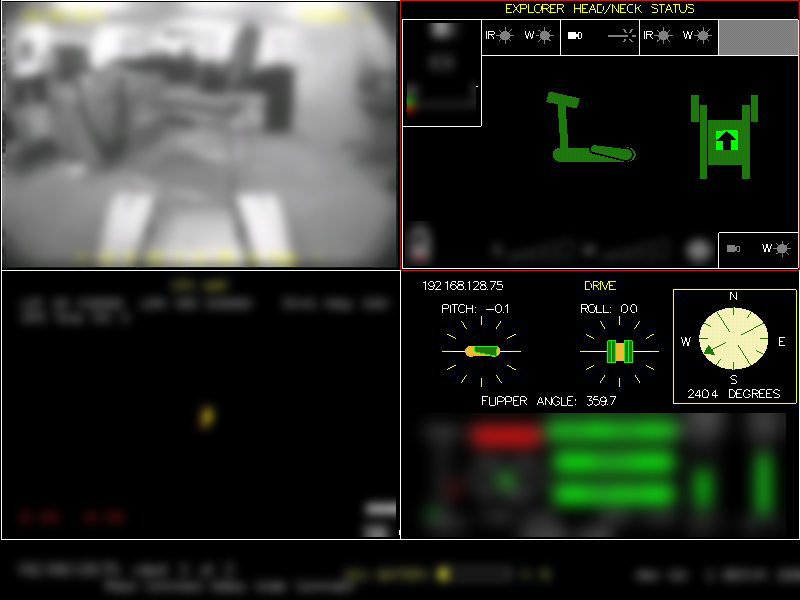
Design iteration (a small sample of the design)

This early design "balances" interface components according to their relative value.
A latter version of the "balanced" layout.

Zoom camera contextual controls display only when needed, combating cognitive load.
This early design "balances" interface components according to their relative value.
"Wizard of Oz" usability study

Paper prototypes were tested. The implementation wasn't testable...yet.
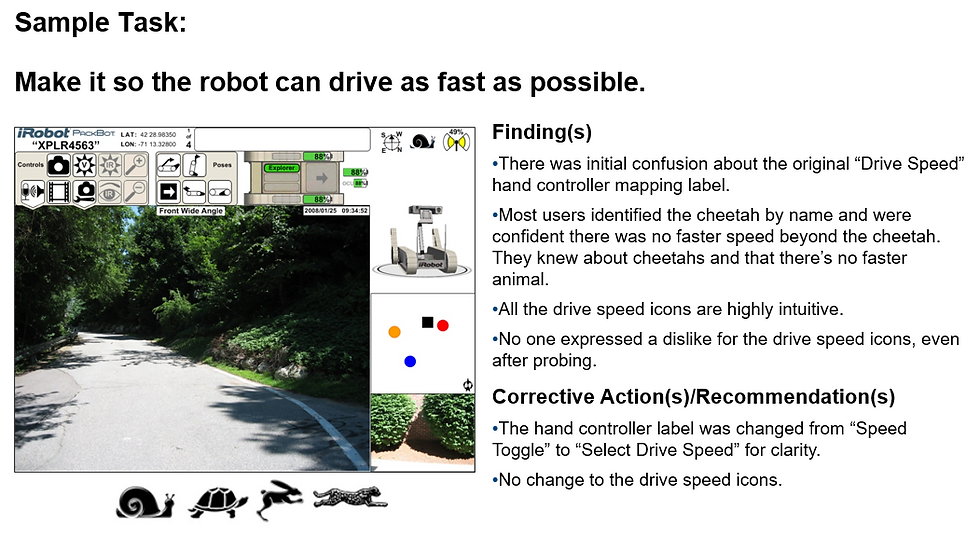
No one poked fun at the drive speed icons AFTER the usability study!
Paper prototypes were tested. The implementation wasn't testable...yet.

I tested my own design. I emphasized the conflict of interest and recommended an external facilitator but the team trusted me. I made sure to live up to their trust.
I found 6 users, wrote the test tasks, and moderated the test according to human subject protocols. After each morning session, I iterated the design for testing the following morning. The design was quite robust after a week of testing and iteration.
I was mentored in usability testing by Beth Loring and a pioneer of this technique, Joe Dumas (aka - Dr. Usability)
Ft. Benning testing
For two weeks the robot and several controllers (in different hardware combos but running the same GUI) were put through mock missions with infantry soldiers at the U.S. Army Research Laboratory - Human Research and Engineering Directorate (ARL-HRED) in Georgia. I didn't attend but several colleagues who did sought me out to tell me the GUI was a hit.
Hardware human factors
The modular controller was the project's largest risk. I acquired a uniform, helmet, and body armor to help make good ergonomic decisions. I offered extensive recommendations before departing iRobot.
Partial recommendations
-
Integrate the controller into a standard ruck sack
-
Use cable assembly to minimize wires and tangling
-
Only human interfacing components on the body
-
Easily stow or conceal the components when not in use. Specialists are targeted.
No Head Mounted Display (HMD)
-
Limits local situational awareness
-
Binocular rivalry is unavoidable & HMDs often move relative to the eye:
-
Eyestrain, fatigue, spatial disorientation, loss of equilibrium, and nausea
-
If an HMD is selected, it should...
-
...not occlude the center of the eye's field of vision
-
...be immobile relative to the eye while walking and operating the robot
Lessons learned
-
I appreciate and very interested in:
-
Solving tough or unique problems
-
"Mission critical" domains where UX is relied upon to avoid serious consequence
-
Physical devices & human factors
-
-
Writing good, succinct copy and crafting great icons is difficult and surprisingly time consuming
-
A "solution looking for a problem" intensifies stakeholder biases
-
Video clips are powerful. It's hard to contradict users and Special Forces users are VERY hard to contradict!